Системы
сканирования
в зондовой
микроскопии.
1
Обратный
пьезоэффект. Всё
действие
системы
сканирования
основано на
обратном
пьезоэффекте.
Рассмотрим что
это за
явление.
Необходимым
условием
существования
пьезоэффекта
у вещества,
является
наличие у вещества
макроскопических
доменов с
постоянным
дипольным
моментом.
Кроме того
необходимо,
чтобы
кристалл,
этого
вещества имел
определённый
тип
симметрии, но
мы не будем
здесь
подробно
останавливаться
на этом.
Примером
вещества из
которого
делают пьезодвигатели для
зондовой
микроскопии
является
цирконат
титанат
свинца.
При
подачи
напряжения
на кристаллт
пьезоэлектрика,
хаотически
расположенные
дипольные
домены
выстраиваются
согласно
внешнему
напряжению.
При этом
каждый домен
растягивает
сила взаимодействия
между
диполем и
внешним
полем. В итоге
кристалл
деформируется
и изменяет свои
размеры. Это
и есть
явление
обратного пьезоэффекта.
На
рис.1
схематично
показан
обратный
пьезоэффект.
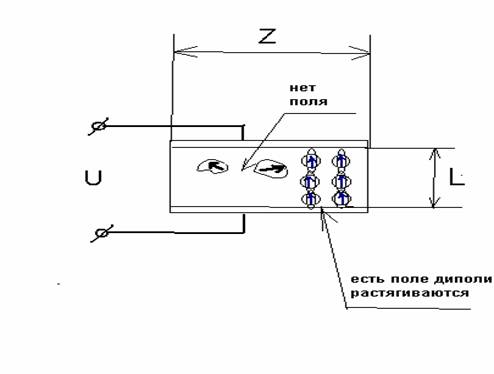
Рис.1
Схема
обратного
пьезоффекта.
Величина,
на которую
растянется
кристалл
после подачи
напряжения
определяется
по формуле:
![]() (1)
(1)
Где ![]() -коэффициент
пропорциональности,
пьезомодуль.
-коэффициент
пропорциональности,
пьезомодуль.
Внешнее
поле
растягивает
диполи.
Оценим какое
напряжение
нужно подать
на пьезокерамику
зондового
микроскопа
чтобы пьзокерамика
растянулась
на 1 нм. ![]() ,
тогда из
формулы 1
находим, что
величина напряжения
которое
нужно подать
на двигатель
чтобы он
шагнул на 1 нм,
равна 5 В.
,
тогда из
формулы 1
находим, что
величина напряжения
которое
нужно подать
на двигатель
чтобы он
шагнул на 1 нм,
равна 5 В.
2
Трёхкоординатный
манупулятор.
В
зондовой
микроскопии
перемещение
образца или
зонда
осуществляется
с помощью треноги,
которая
состоит из
трёх
одинаковых балок
из
пьезокерамики.
Это и
называется трёхкоординатный
манипулятор
(см.рис.2)
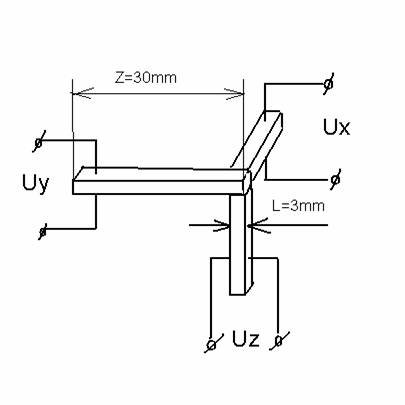
Рис.2
Трёхкоординатный
манипулятор.
Подавая
напряжение
на каждую
балку, можно передвигать
зонд или
образец по
каждой из трёх
координат X,Y,Z.
Оценим на
какую
величину
возможно
движение
образца. Для
этого
воспользуемся
формулой:
![]() (2)
(2)
![]() - коэффициент
пропорциональности,
пьезомодуль,
но для
деформации
вдоль балки.
- коэффициент
пропорциональности,
пьезомодуль,
но для
деформации
вдоль балки.![]() , Z=30мм,
L=3мм, максимальное
напряжение
600В.
Подставляя
эти значения,
получим, что
, Z=30мм,
L=3мм, максимальное
напряжение
600В.
Подставляя
эти значения,
получим, что ![]() . Таким
образом,
манипулятор
может двигать
образец или
зонд в кубе
со стороной
720нм.
. Таким
образом,
манипулятор
может двигать
образец или
зонд в кубе
со стороной
720нм.
3
Шумы.
1)
Шумы
аппаратуры.
В
первую
очередь
оценим шумы,
которая даёт электронная
аппаратура
микроскопа.
Известно, что
вклад в
погрешность
аппаратуры определяется
соотношением:
![]() ,
тогда
погрешность,
обусловленная
шумами
аппаратуры, в
отклонении
зонда составит
,
тогда
погрешность,
обусловленная
шумами
аппаратуры, в
отклонении
зонда составит
![]() Видно,
что
погрешность
в отклонении
зонда очень
мала, чтобы
её учитывать.
Видно,
что
погрешность
в отклонении
зонда очень
мала, чтобы
её учитывать.
2) Температурный
дрейф.
Погрешности,
связанные с
температурой
следующим
образом:
каждая из
балок
движителя
колеблется
случайным
образом из-за
столкновения
с молекулами
воздуха.
Величина
воздействия
молекул
порядка ![]() .
Оценим
только
первую моду
колебаний
балки (см.рис.3),
эта мода и
будет давать
решающий вклад
в
погрешность.
.
Оценим
только
первую моду
колебаний
балки (см.рис.3),
эта мода и
будет давать
решающий вклад
в
погрешность.
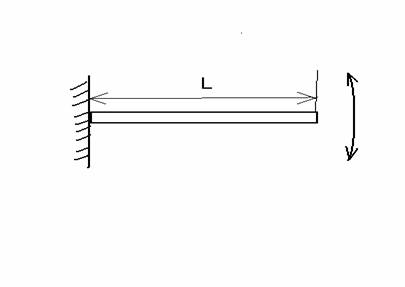
Рис.3
Первая мода
колебаний
балки.
Запишем
простые
уравнение уместное
в этом
случае:
![]() (3)
(3)
![]() (4)
(4)
![]() (5)
(5)
Тогда
можно найти ![]() из (3), (4),(5).
При
подстановки
всех
констант
находим, что:
из (3), (4),(5).
При
подстановки
всех
констант
находим, что:
Таким
образом
основные
факторы,
влияющие на
погрешность
измерения
очень малы и
не влияют на
результаты
измерения.